

{kind=link}

Proper now, as we speak, you’ll be able to spend $14,000 and purchase a humanoid robotic.
There is no such thing as a security certification reviewed, no standardized take a look at protocol verified. You get a machine able to bodily power and real-time autonomous decision-making. And the frameworks for validating its conduct are nonetheless catching as much as what it may well do.
That’s not a criticism of the engineers constructing these techniques. The intelligence facet of robotics is advancing at a tempo that genuinely deserves the thrill it will get: higher notion, extra sturdy locomotion, sooner inference, and tighter management loops.
However right here’s the query I maintain coming again to: Because the management structure of those techniques evolves from easy teleoperation all the way in which to completely autonomous reinforcement studying, are our testing methodologies and security validation processes evolving with them?
I don’t assume they’re. Not but. And I believe that hole is price speaking about, to not sluggish the business down, however to assist it scale responsibly.
Two analysis papers I’ve labored on lately have formed how I take into consideration this. One proposes a framework for classifying robotic intelligence by its underlying management structure. The opposite examines how software program security danger evaluation must evolve for AI-driven techniques.
Collectively, they level towards one thing the business more and more wants: a testing philosophy that scales alongside autonomy. One the place formal security ensures exchange test-case enumeration on the highest ranges, and the place adversarial robustness analysis turns into as routine as purposeful testing.
First, a map of the place we’re
Earlier than we are able to discuss the best way to take a look at autonomous techniques, it helps to be exact about what sort of system we’re really testing.
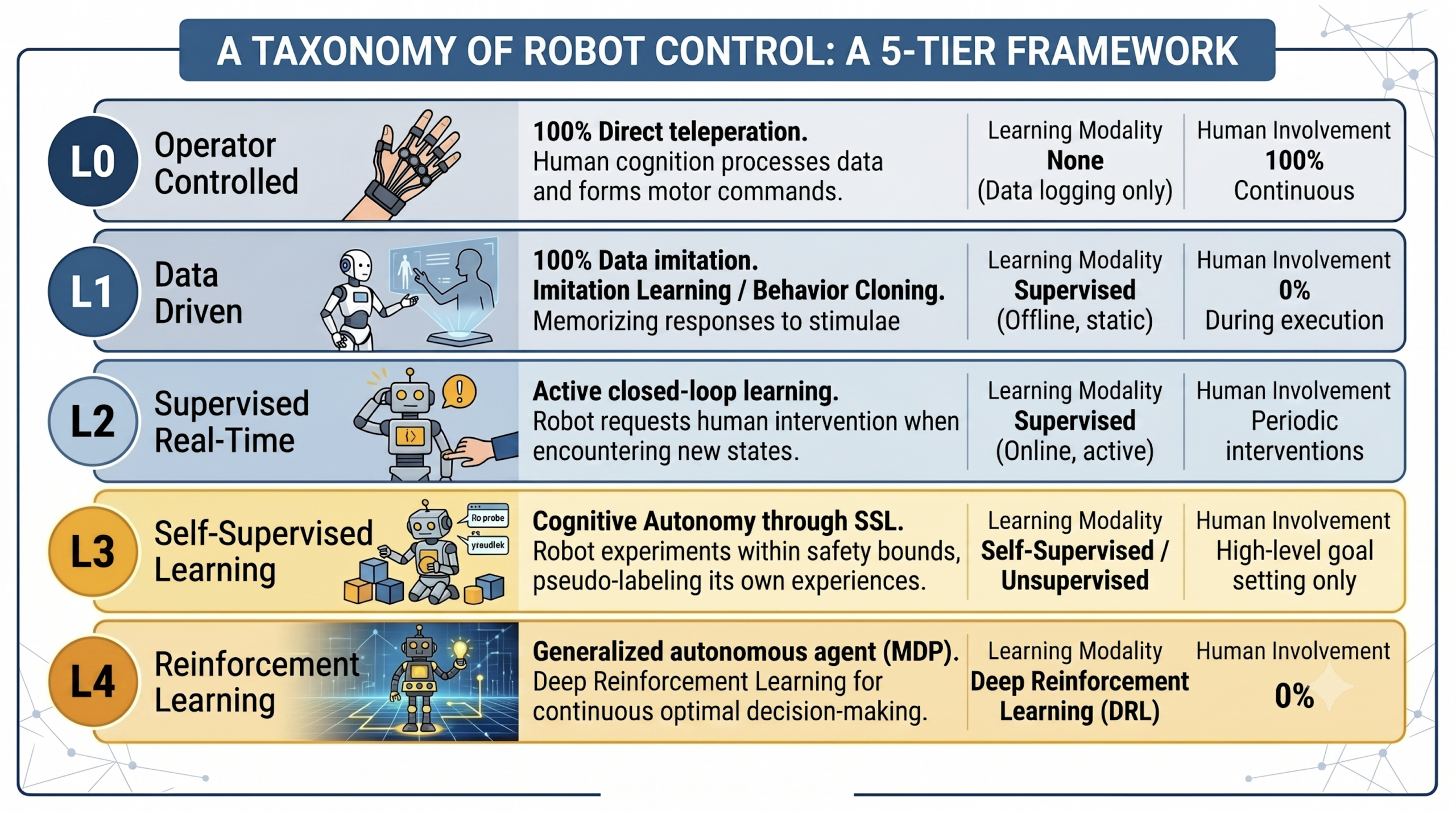
In a lately printed paper, I proposed a five-level taxonomy that classifies robots by their cognitive and management structure, not by how attentive a human operator is — because the SAE driving ranges do — however by how the machine itself is processing info and producing conduct.
Ranges 0 and 1: Teleoperation and imitation. At Degree 0, a human is doing all of the pondering. The robotic executes intent instantly by way of teleoperation. At Degree 1, it has realized to mimic from recorded demonstrations by means of conduct cloning and may function with no reside operator, however solely inside the bounds of what it’s seen. The brittleness right here is well-documented: Robots educated on clear, structured demonstrations battle when real-world circumstances drift even barely from coaching information. A distinct ground texture, an object positioned at an unfamiliar angle. Testing at these ranges is comparatively tractable, and the tooling is mature.
Degree 2: Supervised real-time studying. The robotic can detect its personal uncertainty, pause safely, request correction, and combine that correction into its future conduct utilizing inverse reinforcement studying. Testing turns into a two-part problem: validating the uncertainty detection mechanism itself, and validating the integrity of the training replace triggered by every corrective intervention.
Degree 3: Self-supervised studying. The robotic generates its personal coaching alerts by means of trial and error, annotating its personal successes and failures with out human enter. Right here, the take a look at engineer’s job essentially adjustments. You’re not simply testing mounted conduct. You’re validating a system that’s repeatedly rewriting its personal coverage. Testing must assess not simply present efficiency, but in addition the protection of the training course of itself.
Degree 4: Reinforcement studying. Full autonomy. The robotic frames each activity as an optimization drawback and solves it by means of steady interplay with its setting, usually discovering options a human couldn’t exhibit. At this stage, conventional take a look at case enumeration breaks down. The conduct area is just too giant, too dynamic, and too emergent to enumerate exhaustively.
Every stage up this ladder doesn’t simply add functionality. It additionally provides a essentially completely different sort of failure mode and calls for a essentially completely different method to validation.
The place present security frameworks fall brief
The go-to danger evaluation device in automotive and robotics software program growth is FMEA (failure mode and results evaluation). In a co-authored paper, we examined the particular limitations of software program design FMEA when utilized to AI-driven techniques, and what a extra sturdy method seems like.
The core concern is the danger precedence quantity, or RPN, which is FMEA’s normal scoring mechanism. It multiplies Severity, Incidence, and Detection right into a single rating. The issue turns into apparent the second you set numbers to it: a catastrophic failure rated Severity 10, Incidence 1, Detection 1 scores 10. So does a average failure rated Severity 1, Incidence 1, Detection 10. Identical quantity. Utterly completely different risk.
In a standard deterministic software program system, skilled engineers work round this with judgment. In a neural network-driven system the place failure modes are emergent and context-dependent, that judgment is way tougher to use reliably.
The implications of getting it incorrect aren’t only a failed take a look at. They’re deployment delays, legal responsibility publicity, and within the worst instances, incidents that set again public belief in a whole product class.
The paper proposes integrating a danger precedence matrix alongside HAZOP (hazard and operability examine) evaluation, strategies that consider danger by means of richer contextual lenses reasonably than collapsing the whole lot right into a single quantity. Grounded in ISO 26262 for purposeful security and ISO 21434 for automotive cybersecurity, this mixed method provides engineers a extra nuanced vocabulary for reasoning about AI-specific failure modes.
The regulatory backdrop reinforces why this issues. ISO 25785-1, the primary worldwide security normal for bipedal robots, was printed in Could 2025 and covers industrial office deployment solely. ISO 13482, addressing personal-care robots, was up to date in 2025 however predates trendy basis fashions.
The 2025 revision of ISO 10218-1 for industrial robotics made significant progress, however security researchers are already figuring out gaps in AI-driven humanoids and cellular manipulation that the replace doesn’t absolutely shut. These requirements are important foundations. They want practitioner enter to evolve sooner.
A testing philosophy that scales with autonomy
So what does a extra applicable testing method appear to be throughout these management ranges? Right here’s how I give it some thought.
For Ranges 0 and 1, typical verification and validation strategies apply fairly effectively. {Hardware}-in-the-loop (HiL) testing, structured take a look at suites, and systematic boundary testing of the coaching information distribution are achievable and efficient. The important thing addition for Degree 1 is deliberate out-of-distribution (OOD) testing, probing the perimeters of the coaching corpus deliberately reasonably than assuming protection.
For Degree 2, the take a look at technique must broaden to cowl the training loop itself. Two issues want validation individually:
- The uncertainty quantification mechanism — Does the robotic accurately determine when it doesn’t know one thing?
- The coverage replace mechanism — Does the corrective enter get built-in safely and precisely?
Logging and replay infrastructure turns into important. Each human intervention must be recorded, tagged, and reviewed as a possible sign about the place the coverage is weak.
For Degree 3, formal strategies begin turning into genuinely mandatory reasonably than optionally available. When a system is rewriting its personal coverage by means of self-supervised studying, the protection constraints on that studying course of have to be mathematically specified and verified, not simply empirically examined.
In follow, the toughest a part of Degree 3 validation isn’t the tooling; it’s getting alignment on what “secure exploration” really means in your particular platform earlier than testing begins. Approaches like constrained reinforcement studying and secure exploration algorithms are price constructing into the structure from the beginning, not retrofitting later. Sim-to-real validation cycles have to explicitly stress-test self-supervised behaviors in edge case environments earlier than any real-world deployment.
For Degree 4, the testing philosophy has to shift from test-case enumeration to statistical protection and formal security ensures. Monte Carlo simulation at scale, adversarial setting technology, and area randomization (the identical methods utilized in coaching) must also be core instruments in validation. Behavioral specification frameworks that outline what the coverage mustn’t ever do, no matter what it discovers, are as essential as efficiency benchmarks.
The federated studying query
One space that deserves specific consideration because the business scales towards Degree 4 is federated reinforcement studying, the paradigm the place robotic fleets share coverage updates throughout a community, distributing compute and accelerating studying convergence.
The effectivity positive factors are actual and vital. However the testing and validation necessities are qualitatively completely different from single-robot techniques.
When coverage updates movement peer-to-peer throughout a fleet, the integrity of these updates must be verified on the level of aggregation. Analysis on federated studying safety has documented particular failure modes: information poisoning, the place a compromised node submits manipulated updates; backdoor assaults, the place a set off embedded throughout coaching causes focused misbehavior at inference time; and mannequin inversion, the place gradient sharing inadvertently leaks details about native coaching environments. These aren’t theoretical. They’re empirically demonstrated.
Testing a federated system, subsequently, wants to incorporate adversarial robustness analysis of the aggregation mechanism, not simply the person coverage. Byzantine-fault-tolerant aggregation algorithms like Krum and FedProx, anomaly detection on incoming gradient updates, and cryptographic verification of replace provenance are all engineering decisions that must be in scope throughout design and testable throughout validation.
Differential privateness methods utilized on the level of gradient sharing supply one other layer of safety, limiting what a compromised replace can reveal or corrupt. These aren’t unique analysis instruments. They’re obtainable, documented, and more and more essential to deal with as normal follow in any federated deployment.
Bringing it collectively
The development from Degree 0 to Degree 4 is genuinely thrilling. The potential being demonstrated throughout autonomous automobiles, humanoid platforms, and industrial techniques is actual and significant. What the business wants now’s a testing philosophy that matures on the similar tempo.
Which means treating security validation as a first-class design constraint, not a ultimate checkpoint. It means constructing HAZOP and Threat Precedence Matrix evaluation into the software program growth course of from the beginning, not pulling out a FMEA spreadsheet earlier than launch. It means defining what constitutes sufficient protection for a self-supervised or RL-trained system earlier than deploying it, not after the primary incident.
And it means giving requirements our bodies the practitioner suggestions they should evolve ISO 26262, ISO 21434, and the rising bipedal robotic requirements sooner than the expertise is outpacing them.
The robots are getting smarter sooner than the validation frameworks designed to certify them. Closing that hole isn’t a regulatory drawback or a analysis drawback in isolation. It’s an engineering tradition drawback. It will get solved when testing is handled as a first-class design self-discipline from day one, not a ultimate gate earlier than launch.
For these engaged on autonomous techniques at any of those ranges: at what level does the complexity of the system make conventional test-case enumeration genuinely out of date, and what have you ever discovered really replaces it? I’d particularly like to listen to from anybody navigating Degree 3 or Degree 4 validation in manufacturing.
 Submit your session concept for the 2026 RoboBusiness
Submit your session concept for the 2026 RoboBusinessIn regards to the writer
 Atharv Kolhar is a employees take a look at automation engineer at Determine AI. There, he works on hardware-in-the-loop take a look at infrastructure for the Determine 03 humanoid robotic and the testing of important robotic software program. With a profession throughout humanoid robotics, autonomous lidar sensing, and electrical automobiles, he makes a speciality of verification for safety-critical autonomous techniques, beforehand constructing the software program take a look at self-discipline behind Aeva Applied sciences’ ASPICE Degree 2 certification, with earlier roles at Lucid Motors and NIO.
Atharv Kolhar is a employees take a look at automation engineer at Determine AI. There, he works on hardware-in-the-loop take a look at infrastructure for the Determine 03 humanoid robotic and the testing of important robotic software program. With a profession throughout humanoid robotics, autonomous lidar sensing, and electrical automobiles, he makes a speciality of verification for safety-critical autonomous techniques, beforehand constructing the software program take a look at self-discipline behind Aeva Applied sciences’ ASPICE Degree 2 certification, with earlier roles at Lucid Motors and NIO.
Kolhar is a voting member of IEEE P2817, the working group writing the worldwide normal for autonomous techniques verification, a committee member of ASTM F45.06 on legged robotic techniques, and a peer reviewer for IEEE IROS and IEEE Transactions on Automation Science and Engineering.
The views expressed on this article are solely his personal and don’t signify the place, opinion, or stance of his employer or any affiliated group.
Editor’s notes: This text attracts on two printed papers: “Standardizing Robotic Management Ranges: A Framework for Autonomous Operation, Actual-Time Navigation, and Federated Reinforcement Studying” (IJRCAR, Vol. 14, Problem 3, March 2026) and “Enhancing Software program DFMEA Processes by means of ISO 26262 and ISO 21434: Addressing RPN Limitations with Threat Precedence Matrix and HAZOP Integration” (IRE Journals, Vol. 8, Problem 7, 2025).