

{kind=link}
Knowledge, Deployment, and the Actual Path to Bodily AI
The Humanoids Summit made one factor very clear: progress in humanoid robotics isn’t being restricted by ambition, however as a substitute by knowledge, reliability, and deployment actuality.
Throughout talks, demos, and hallway conversations, a constant theme emerged. The trade is now not asking if humanoids will work, however how to coach them, consider them, and deploy them safely at scale.
Right here’s what stood out most.
Everybody agrees that high-quality knowledge is the inspiration of Bodily AI. The nuance isn’t about whether or not to gather a sure sort of knowledge; groups need as a lot as they will get. The distinction is in how they allocate sources throughout the information spectrum, as a result of every layer comes with its personal price, problem, and payoff.
Most groups described some model of a “knowledge pyramid”:
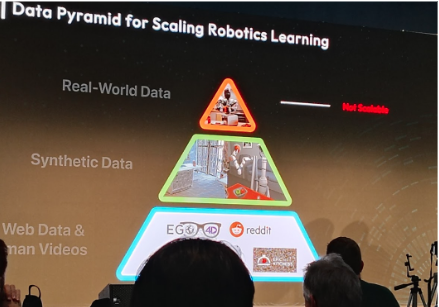
1. Actual robotic deployment
That is the gold normal. Actual robots performing actual duties generate probably the most transferable knowledge. The issue?
It doesn’t scale.
Deployments are costly, gradual, and constrained by {hardware} availability. Even probably the most superior groups can solely accumulate a lot knowledge this manner.
2. Teleoperation
Teleop is changing into a key center floor. Some improvements seen had been utilizing digital teleoperation together with actual world teleoperation.
We spoke with a number of startups engaged on this layer:
- Contact CI with haptic gloves
- Lightwheel, enabling large-scale digital teleoperation
- Labryinth AI, VR-based approaches translating human movement into robotic joint knowledge
Teleop knowledge is extra scalable than full deployment, however nonetheless resource-intensive.
3. Human-centered knowledge (video, movement seize)
That is probably the most plentiful…and the least transferable.
Human video datasets are broadly out there, however translating them into dependable robotic conduct stays difficult.
The rising consensus?
Most groups are coaching fashions first on large-scale human knowledge, then fine-tuning with teleop and actual deployment knowledge. It’s a realistic strategy to a tough scaling drawback.
The open query stays:
Do humanoids want billions of knowledge factors—or trillions? And the way effectively can that knowledge be transformed into helpful conduct? Will new algorithms grounded in physics and kinematics alleviate the information dependency drawback?
One other main divide on the summit centered on the place to focus effort.
The “Generalizable Mannequin” Camp
Firms like Skild AI, Galbot, and others are betting on massive, foundational fashions that may generalize throughout many duties. They’re taking part in the lengthy sport: constructing large datasets, simulation pipelines, and broad reasoning capabilities.
The upside is obvious: long-term flexibility.
The chance is simply as clear: lengthy timelines, excessive burn charges, and restricted near-term deployment.
The “Dependable Deployment” Camp
Different firms are prioritizing application-ready humanoids:
- Agility
- Area AI
- Persona
- torqueAGI
These groups are specializing in reliability, security, and slim however priceless use instances. Agility stood out by having humanoids working in warehouses for actual purchasers.
Their message was constant:
If the robotic isn’t dependable, a human has to oversee it, after which the ROI disappears.
World fashions, foundational fashions, and a lacking piece: Analysis
Many audio system centered on the emergence of World Basis Fashions—techniques with broad capacity to grasp bodily interactions. The dialog centered round determining one of the best ways to construct and practice them: what knowledge they want, how they generalize throughout environments, and the way a lot bodily interplay is required to be taught significant behaviors.
Excessive-fidelity world fashions are laborious to construct as a result of they require extraordinarily correct bodily knowledge. Even more durable? Evaluating progress.
Proper now, there’s no normal technique to measure whether or not a world mannequin is actually bettering real-world process efficiency. NVIDIA’s upcoming analysis arenas had been talked about as a promising step, however this stays an open problem.
Agility introduced one of many clearest frameworks for humanoid worth:
Humanoids shine the place you want:
- Mobility in cluttered, altering environments
- Flexibility to rotate between a number of duties
- Dynamic stability to select, carry, and transfer payloads from awkward positions
One compelling instance was utilizing a humanoid to hyperlink two semi-fixed however unstructured techniques—like shifting items from a shelf on an AMR to a conveyor. These are workflows which are awkward for conventional robots however pure for human-shaped machines.
A number of themes got here up repeatedly when discussing real-world deployment:
- Configurability: If deployment isn’t easy, you lose flexibility—the core humanoid worth proposition.
- Reliability: Unreliable robots merely shift work as a substitute of eliminating it.
- Security: At scale, humanoids have to be robustly protected.
These challenges mirror what producers already know from collaborative automation: know-how solely creates worth when it really works constantly, safely, and predictably.
Probably the most animated debates was about palms versus grippers.
Regardless of spectacular demos of anthropomorphic palms, most practitioners had been candid:
- Palms are laborious to manage
- They’re tough to deploy reliably
- Dexterity provides important complexity
The prevailing view was pragmatic:
Grippers (particularly bimanual setups) will dominate within the close to time period.
They resolve the vast majority of manipulation duties with far much less complexity. Dexterous palms could arrive later, however greedy comes first.
That stated, curiosity in tactile sensing was sturdy. Researchers and firms are exploring:
- The way to construction tactile and haptic knowledge
- What robots ought to really measure
- The way to visualize and use contact info successfully
From a Robotiq perspective, a number of conclusions stand out:
- The humanoid ecosystem wants feature-dense, scalable, dependable {hardware}
- Ease of integration, from {hardware} to software program and communication is crucial, which is the place Robotiq’s plug-and-play mentality suits properly
- Grippers will stay central to real-world Bodily AI within the close to time period
- Power-torque and tactile sensing are more and more related, from humanoids to prosthetics
- Customization (fingertips, type elements) will matter for rising manipulation duties like scooping or fabric dealing with
Maybe most significantly, the summit bolstered a well-known lesson: automation succeeds when it strikes from spectacular demos to operational reliability.
Humanoid robotics is progressing quickly—however not linearly. The businesses making actual progress are those grappling severely with knowledge high quality, deployment constraints, and security at scale.
The way forward for Bodily AI received’t be determined by the flashiest demo. It will likely be determined by who can ship dependable techniques, educated on the proper knowledge, fixing actual issues—day after day.
That’s the place humanoids cease being analysis initiatives and begin changing into instruments.
